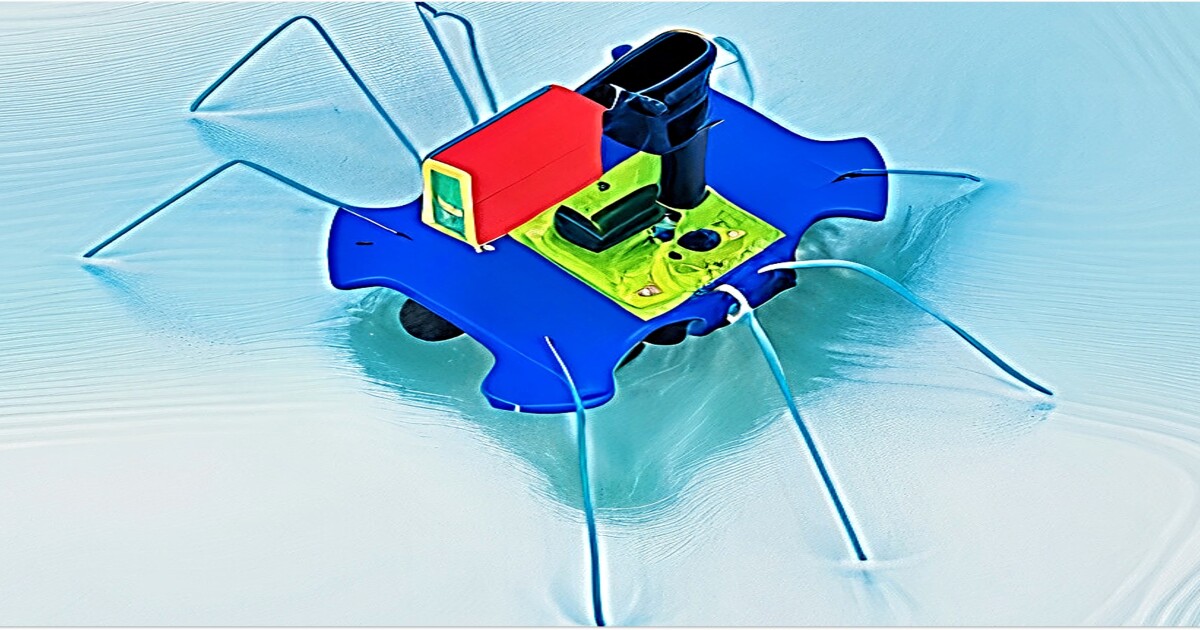
Researchers have prototyped sensor-charged robotic bugs that mimic biological digestive systems to meet energy needs, use a Janus interface for a steady supply of nutrients, and move across the surface of water like water pedals.
In 2017, DARPA proposed a program to develop and deploy thousands of floating sensors aimed at collecting environmental data such as “ocean temperature, sea state and location, as well as data on the activity of commercial vessels, aircraft and even marine mammals moving across the ocean.” .”
Called Ocean of Things — and basically akin to a series of sensor-laden smart devices that collect information across the Internet of Things — the project’s page says that sensor data will be uploaded to government cloud storage for analysis, and that the OoT would support military missions while also being open to research bodies and commercial concerns.
Professor Seokheum Choi of Binghamton University has been working on just such a device for the past 10 years or so, funded by the Office of Naval Research. Now, Choi and his team have developed a small aquatic robot that can glide across the surface and is powered by onboard bacteria instead of conventional energy systems such as solar, kinetic or thermal.
“Researchers are actively pursuing various innovative strategies to enable self-sustaining robots that harvest energy directly from their marine environment,” the team notes in their paper. “These strategies include harnessing solar energy, kinetic energy from waves or currents, osmotic potential of saltwater, temperature gradients and moisture-driven energy sources.
“Despite the innovative nature of these approaches, the variable availability of light and mechanical energy in the marine environment, combined with the relatively low energy yields from salinity gradients, temperature differences and humidity levels, pose significant challenges. These limitations hinder the ability to guarantee reliable and continuous operation of aquatic robots solely based on current energy harvesting technologies.”

Binghamton University
The power unit of the new system is built on a microbial fuel cell using spore-forming bacteria known as Bacillus subtilis for a mini generator inspired by biological processes of digestion that converts organic matter into electricity through catalytic reduction-oxidation reactions.
“When the environment is favorable for bacteria, they become vegetative cells and generate energy, but when conditions are not favorable — for example, it’s really cold or nutrients are not available — they revert to spores,” Choi said. “This way we can extend the operational life.”
The anode in the fuel cell is made of polypyrrole-coated carbon fabric – selected for its excellent conductivity and ability to support bacterial colonization. The electron-accepting cathode is also carbon cloth, but decorated with polypyrrole-coated platinum and chosen for its “catalytic properties to accelerate the reduction of oxygen”. The final piece of the puzzle is the Nafion 117 membrane for selective proton transfer.
The integrated propulsion unit also has adjacent hydrophobic and hydrophilic surfaces that allow a “unidirectional flow of organic substrates” from the ocean water and supply the bacterial spores with nutrients.
A single fuel cell setup managed “a maximum power density of 135 µW cm-2 and an open-circuit voltage of 0.54 V,” but scaling up to a six-unit array resulted in the observed power generation of nearly a milliwatt. This output may be relatively small in the grand scheme of things, but it is sufficient for a small DC motor that sits on a platform, as well as for on-board sensors.
“To achieve smooth aquatic locomotion, the robot uses the rotational force of the motor to exert a reaction force on the platform and propel it forward across the water surface without direct force on the water itself,” the researchers explained, while “the hydrophobic characteristic contributes to the main buoyancy force.” they have also been treated with a hydrophobic coating, so it can slide on the surface of the water like a water pedal.
So the idea is to be able to deploy fleets of small data collectors wherever they are needed and at any time, rather than being tied down to one location for their entire operational lifetime.
“While this work successfully demonstrates self-sustaining mobility on water surfaces powered by an integrated MFC array, exploration into practical applications such as localization, sensing and signal processing and transmission in aquatic robotic platforms remains a ripe area for development,” he noted. team. More work is also needed on long-term performance and suitability for various environmental conditions. However, the current system serves as a proof of concept for the new design.
An article about the research was published in the journal Advanced materials technology.
Source: Binghamton University